Publications
Some selected publications of AIRO Lab members.
2025
- Fast Fixed-Time Distributed Neural Formation Control-Based Disturbance Observer for Multiple Quadrotor UAVs Under Unknown DisturbancesIEEE Transactions on Aerospace and Electronic Systems, 2025
- Adaptive Predefined-Time Disturbance Observer-Based Fast Nonsingular Sliding Mode Control Strategy for Consumer Quadrotor UAVs: Theory and ExperimentsIEEE Transactions on Consumer Electronics, 2025
- Velocity-Free Adaptive Neural-Fuzzy Predefined-Time Attitude Control for SpacecraftIEEE Transactions on Aerospace and Electronic Systems, 2025
- Prescribed-Time Fault-Tolerant Flight Control for Aircraft Subject to Structural DamageIEEE Transactions on Aerospace and Electronic Systems, 2025
- Direct Lift Control for Carrier-Based Aircraft With Predefined-Time Incremental StrategyIEEE Transactions on Aerospace and Electronic Systems, 2025
- Fast fixed-time incremental backstepping fault-tolerant control for aircraft with asymmetric wing damageAerospace Science and Technology, 2025
- Underwater sequential images enhancement via diffusion and physics priors fusionInformation Fusion, 2025
- An Optimization-Based Robot Navigation System in Complex Terrain on a Hybrid MapIEEE Transactions on Vehicular Technology, 2025
- Hierarchical 3D Scene Graph based Semantic-Metric SLAM for Plant Inspection and Fruit Counting in Intelligent Hydroponics SystemIEEE Internet of Things Journal, 2025
- Spatial–Temporal Diffusion Model for Underwater Scene Reconstruction With Application to AUV NavigationIEEE/ASME Transactions on Mechatronics, 2025
- PF-MAAC: A learning-based method for probabilistic optimization in time-constrained non-adversarial moving target searchSwarm and Evolutionary Computation, 2025
- SMC-Searcher: Signal Mediated Coordination for Decentralized Multi-Robot Adversarial Moving Target SearchIEEE Transactions on Emerging Topics in Computational Intelligence, 2025
- Approximate Optimal Recursive Sliding Mode Control for Quadrotors and Adaptive Parameter Optimization Via Deep Reinforcement LearningUnmanned Systems, 2025
- Fixed-Time Adaptive Consensus Control for Multi-Quadrotor Subject to External Disturbances via Deep Reinforcement LearningAerospace Science and Technology, 2025
- A Modified Predefined-time Convergence Criterion Design on Quadrotor Position ControlIn 2025 International Conference on Decision and Control (CDC), 2025
- AVIP: Acoustic-Visual-Inertial-Pressure Fusion-based Underwater Localization System with Multi-Centric CalibrationIn 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
- Sliding Mode-Based Approximate-Optimal Control of Unknown Second-Order Nonaffine Systems Subject to Input SaturationIn 2025 44th Chinese Control Conference (CCC), 2025
- Coverage Path Planning for Autonomous Aircraft Inspection Using UAVsIn AIAA SCITECH 2025 Forum, 2025
- Multi-Layer Path Planning for Complete Structural Inspection Using UAVDrones, 2025
- Disturbance-observer-based fixed-time backstepping control for quadrotors with input saturation and actuator failureDrones, 2025
- Intelligent Joint Space Path Planning: Enhancing Motion Feasibility with Goal-Driven and Potential Field StrategiesSensors, 2025
2024
-
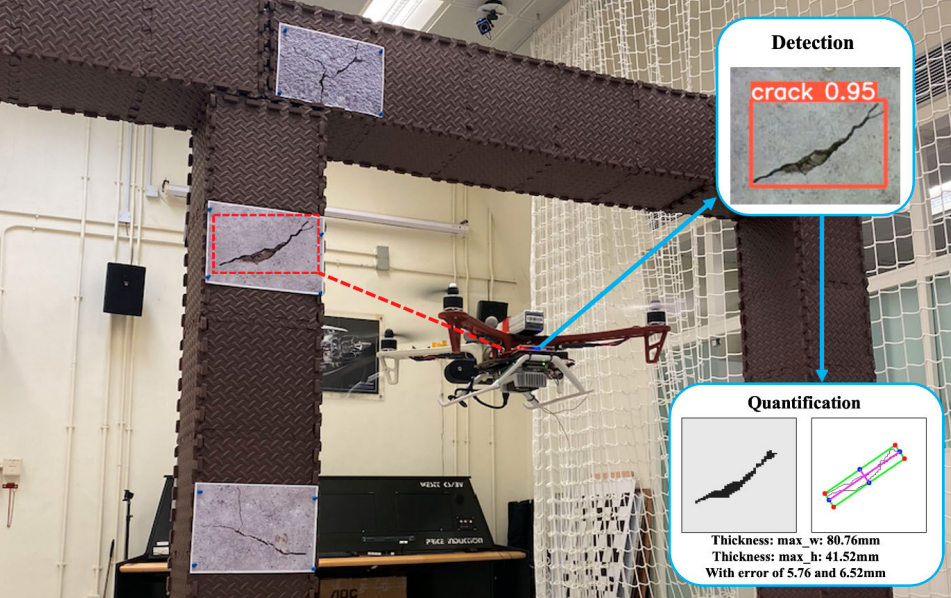 Advancing UAV-based Inspection System: The USSA-Net Segmentation Approach to Crack QuantificationIEEE Transactions on Instrumentation and Measurement, 2024
Advancing UAV-based Inspection System: The USSA-Net Segmentation Approach to Crack QuantificationIEEE Transactions on Instrumentation and Measurement, 2024 - LiDAR Stereo Visual Inertial Pose Estimation Based on Feedforward and FeedbacksIn 2024 International Conference on Unmanned Aircraft Systems (ICUAS), 2024
- Sampling-efficient path planning and improved actor-critic-based obstacle avoidance for autonomous robotsScience China Information Sciences, 2024
- A Modular Pneumatic Soft Gripper Design for Aerial Grasping and LandingIn 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), 2024
- A fast planning approach for 3D short trajectory with a parallel frameworkMechatronics, 2024
-
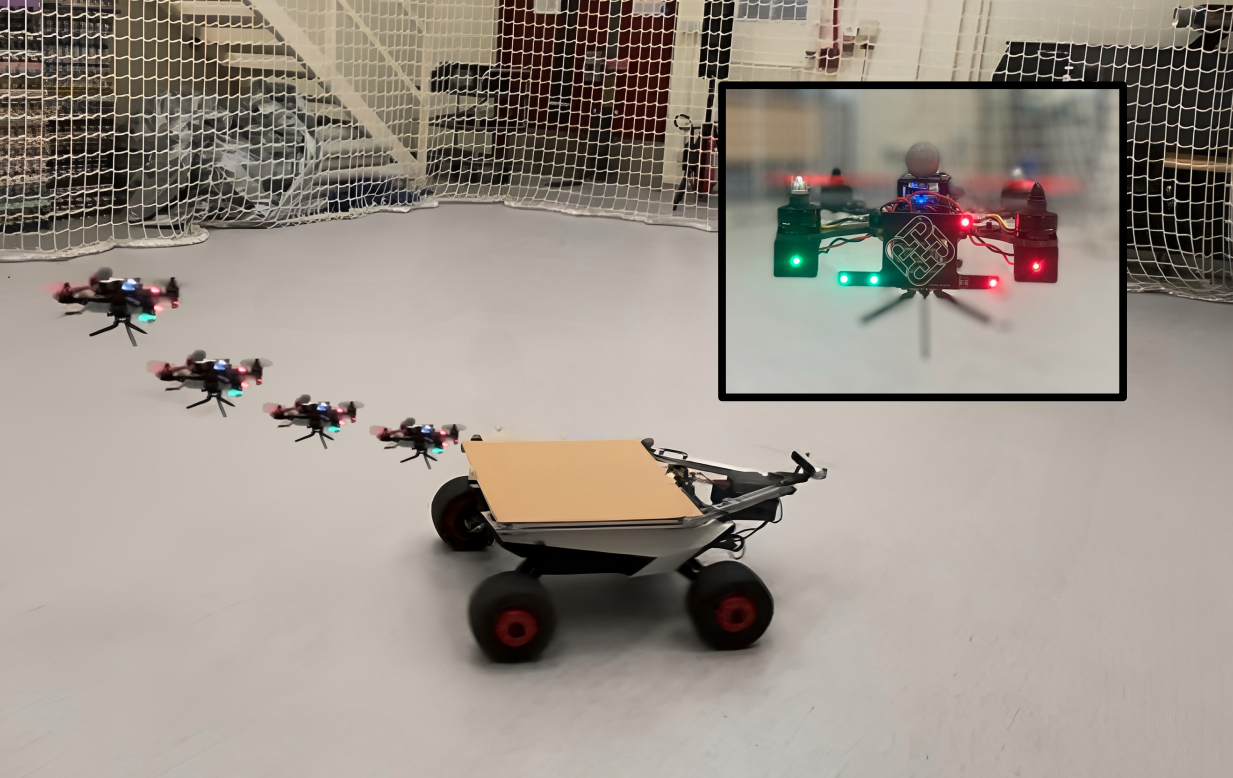 Towards Non-Robocentric Dynamic Landing of Quadrotor UAVsarXiv preprint arXiv:2401.11445, 2024
Towards Non-Robocentric Dynamic Landing of Quadrotor UAVsarXiv preprint arXiv:2401.11445, 2024 - Disturbance Observer-Based Model Predictive Control for an Unmanned Underwater VehicleJournal of Marine Science and Engineering, 2024
- A robust sliding-mode control framework for quadrotors subject to model uncertainty and external disturbancesIn Proceedings of the 2024 American Control Conference, 2024
- Event-triggered distributed observer for a rigid body leader system over acyclic switching networks and its applicationUnmanned Systems, 2024


2023
- Hybrid Aerodynamics-Based Model Predictive Control for a Tail-Sitter UAVarXiv preprint arXiv:2312.14453, 2023
- A Low-Cost Relative Positioning Method for UAV/UGV Coordinated Heterogeneous System Based on Visual-Lidar FusionAerospace, 2023
- Landing a Quadrotor on a Ground Vehicle without Exteroceptive Airborne Sensors: A Non-Robocentric Framework and ImplementationIn 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), 2023
-
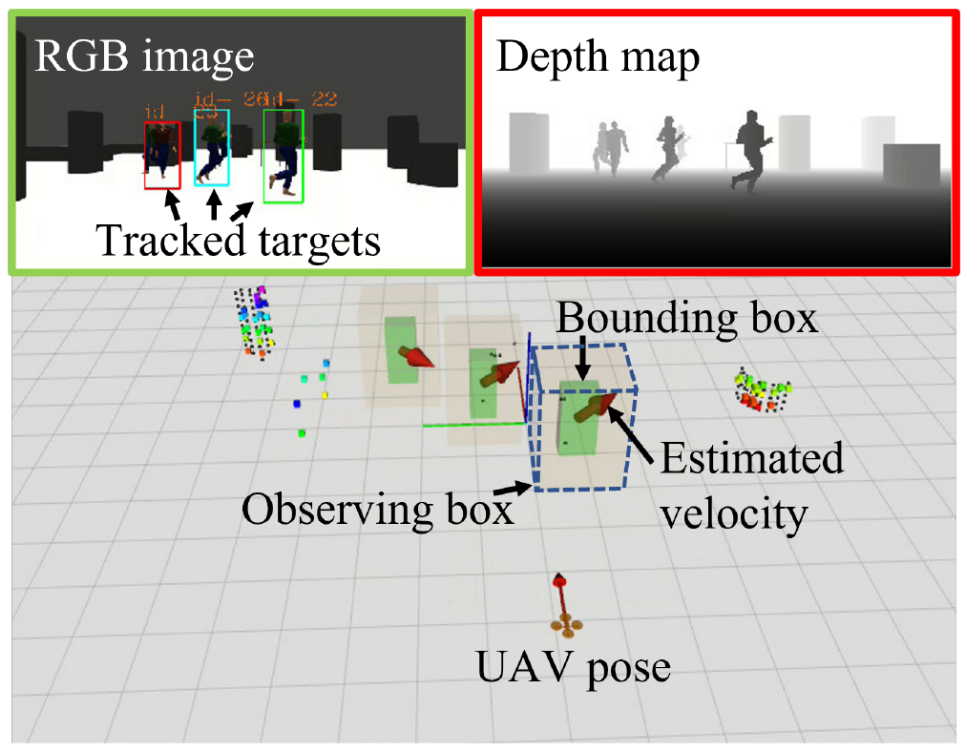 Flying in Dynamic Scenes With Multitarget Velocimetry and Perception-Enhanced PlanningIEEE/ASME Transactions on Mechatronics, 2023
Flying in Dynamic Scenes With Multitarget Velocimetry and Perception-Enhanced PlanningIEEE/ASME Transactions on Mechatronics, 2023 -
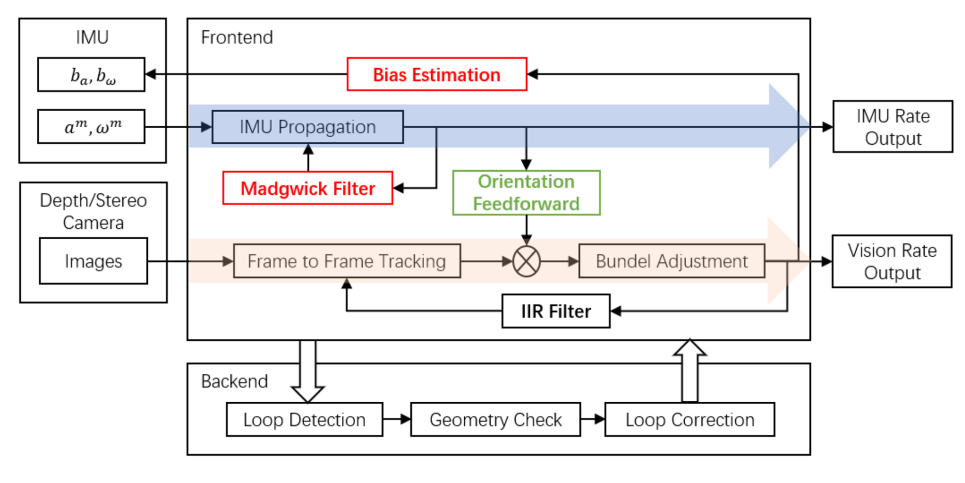 Stereo visual inertial pose estimation based on feedforward and feedbacksIEEE/ASME Transactions on Mechatronics, 2023
Stereo visual inertial pose estimation based on feedforward and feedbacksIEEE/ASME Transactions on Mechatronics, 2023 - Filtering 2D-3D outliers by camera adjustment for visual odometryIEEE Transactions on Instrumentation and Measurement, 2023
- A novel real-time autonomous crack inspection system based on unmanned aerial vehiclesSensors, 2023
- Constrained linear output regulation via measurement output feedback model predictive controlAutomatica, 2023
- Event-triggered distributed observer for rigid body systems over jointly connected acyclic switching networksIFAC-PapersOnLine, 2023


2022
- UAV Path Planning for Complete Structural Inspection using Mixed Viewpoint GenerationIn 2022 17th International Conference on Control, Automation, Robotics and Vision (ICARCV), 2022
- High-Speed Three-Dimensional Aerial Vehicle Evasion Based on a Multi-Stage Dueling Deep Q-NetworkAerospace, 2022
- Deep pose graph-matching-based loop closure detection for semantic visual SLAMSustainability, 2022
- Neural network based model predictive control for a quadrotor UAVAerospace, 2022
- A novel multispectral line segment matching method based on phase congruency and multiple local homographiesRemote Sensing, 2022
- Autonomous exploration of unknown indoor environments for high-quality mapping using feature-based RGB-D SLAMSensors, 2022
- Development of fixed-wing UAV 3D coverage paths for urban air quality profilingSensors, 2022
- An end-to-end UAV simulation platform for visual SLAM and navigationAerospace, 2022
- Proactive guidance for accurate UAV landing on a dynamic platform: A visual–inertial approachSensors, 2022
- An event-triggered distributed observer for leader-following consensus of multiple rigid body systems over switching networksIn 2022 IEEE 61st Conference on Decision and Control (CDC), 2022
2021
- Dynamic object tracking on autonomous UAV system for surveillance applicationsSensors, 2021
- Learning-based autonomous uav system for electrical and mechanical (E&m) device inspectionSensors, 2021
- Multilayer mapping kit for autonomous UAV navigationIEEE access, 2021
2020
- System identification and control for a tail-sitter unmanned aerial vehicle in the cruise flightIEEE access, 2020
- An actuator allocation method for a variable-pitch propeller system of quadrotor-based UAVsSensors, 2020
- Transition optimization for a VTOL tail-sitter UAVIEEE/ASME transactions on mechatronics, 2020
- Perception in the dark; development of a ToF visual inertial odometry systemSensors, 2020
2019
- Position control of a tail-sitter UAV using successive linearization based model predictive controlControl Engineering Practice, 2019
- Model-aided wind estimation method for a tail-sitter aircraftIEEE Transactions on Aerospace and Electronic Systems, 2019
- Recent advances in fuel cells based propulsion systems for unmanned aerial vehiclesApplied Energy, 2019
2018
- Design and implementation of a real-time hardware-in-the-loop testing platform for a dual-rotor tail-sitter unmanned aerial vehicleMechatronics, 2018
- Development of model predictive controller for a Tail-Sitter VTOL UAV in hover flightSensors, 2018
- Model predictive control for path tracking of a VTOL tailsitter UAV in an HIL simulation environmentIn 2018 AIAA modeling and simulation technologies conference, 2018
2017
- Dynamic modeling and hardware-in-loop simulation for a tail-sitter unmanned aerial vehicle in hovering flightIn AIAA modeling and simulation technologies conference, 2017
2016
- A camera-based target detection and positioning UAV system for search and rescue (SAR) purposesSensors, 2016
- Development and testing of a two-UAV communication relay systemSensors, 2016
- Experimental investigation on flow characteristics of a four-wing micro air vehicleInternational Journal of Micro Air Vehicles, 2016
- Optimization of lift force for a bio-inspired flapping wing model in hovering flightInternational Journal of Micro Air Vehicles, 2016
2015
- An experimental study of flow pattern on a four-wings MAVIn ASME-JSME-KSME Joint Fluids Engineering Conference, 2015