AIRO Lab
Autonomous & Intelligent RObotics Lab @ PolyU Research Centre for Unmanned Autonomous Systems
About Us

Welcome to the Autonomous and Intelligent Robotics Lab (AIRO Lab)! We are one of the member of the Research Centre for Unmanned Autonomous Systems, of the Department of Aeronautical and Aviation Engineering of The Hong Kong Polytechnic University. Feel free to browse through our research paper (click me) and code (click me); drop us an email or issue for any discussion!



news
| Jun 06, 2024 | Our group won the first runner-up prize at the 2024 International Conference on Unmanned Aircraft Systems (ICUAS’24) Unmanned Aerial Vehicle (UAV) Competition held in Chania, Crete, Greece. |
|---|---|
| May 24, 2024 | Our paper “Advancing UAV-based Inspection System: The USSA-Net Segmentation Approach to Crack Quantification.”, authored by Tse, Kwai-Wa, Rendong Pi, Wenyu Yang, Xiang Yu, and Chih-Yung Wen, is accepted for publication in the IEEE Transactions on Instrumentation and Measurement (TIM). |
| Jun 09, 2023 | Our group won the first runner-up prize at the 2023 International Conference on Unmanned Aircraft Systems (ICUAS’23) Unmanned Aerial Vehicle (UAV) Competition held in held in Warsaw, Poland. |
| Jun 09, 2023 | Our group won the first runner-up prize at the 2023 International Conference on Unmanned Aircraft Systems (ICUAS’23) Unmanned Aerial Vehicle (UAV) Competition held in held in Warsaw, Poland. |
| Jun 09, 2016 | Our group won the championship at the 2016 Taiwan UAV Creative Design Competition (台湾无人飞机设计竞赛) Taiwan. |
selected publications
-
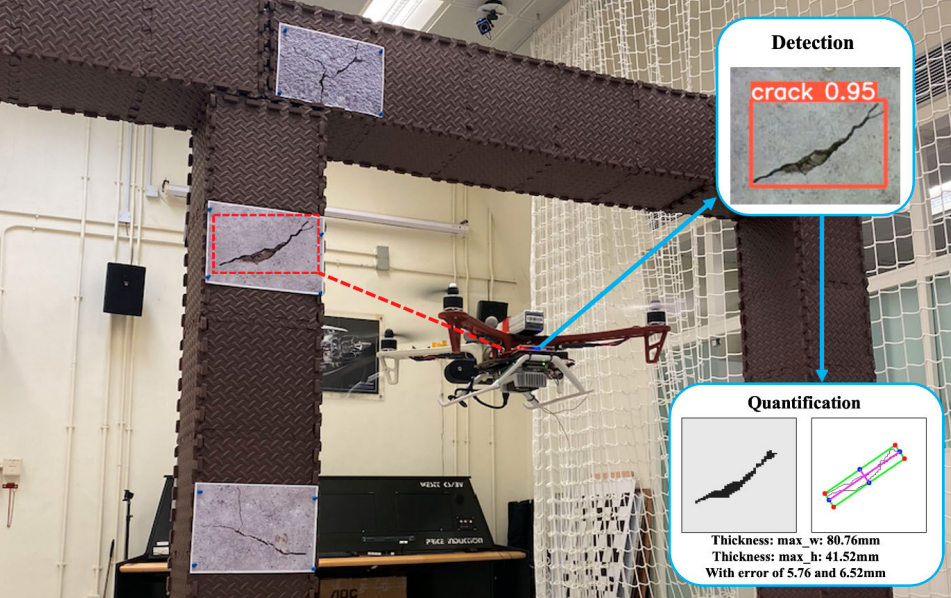 Advancing UAV-based Inspection System: The USSA-Net Segmentation Approach to Crack QuantificationIEEE Transactions on Instrumentation and Measurement, 2024
Advancing UAV-based Inspection System: The USSA-Net Segmentation Approach to Crack QuantificationIEEE Transactions on Instrumentation and Measurement, 2024 -
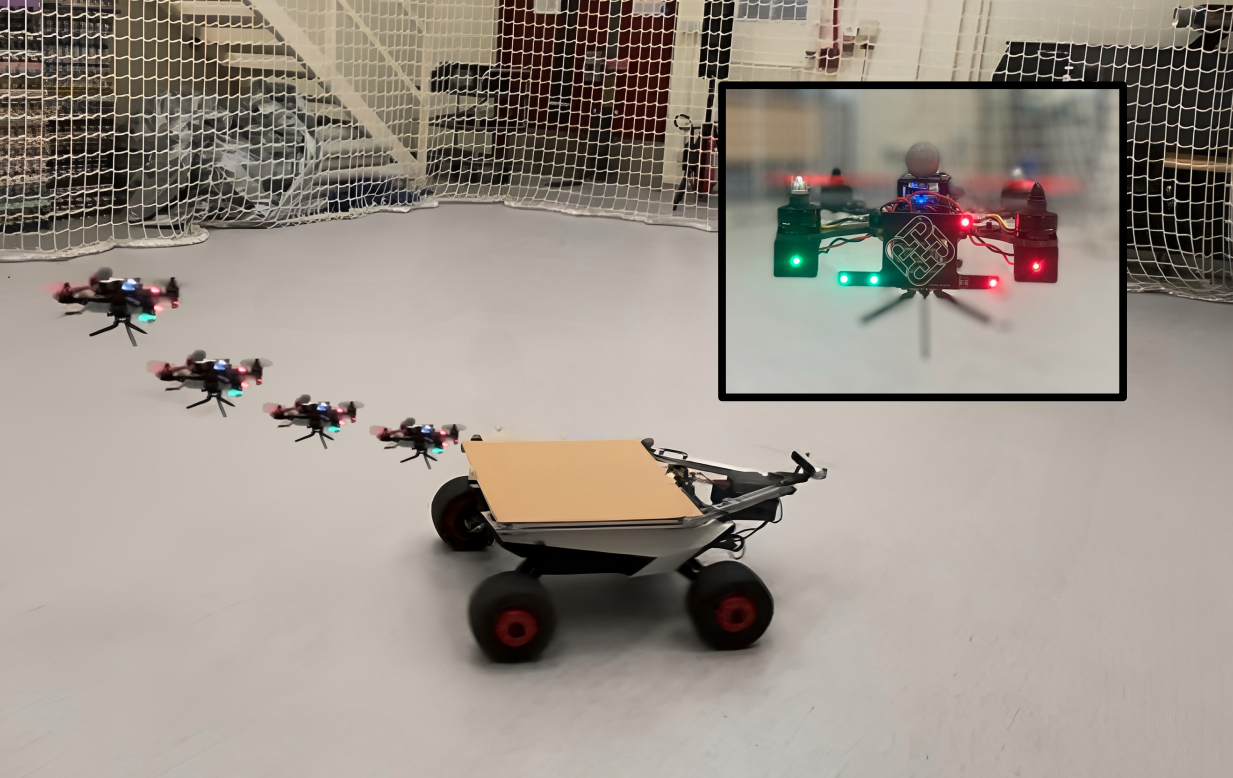 Towards Non-Robocentric Dynamic Landing of Quadrotor UAVsarXiv preprint arXiv:2401.11445, 2024
Towards Non-Robocentric Dynamic Landing of Quadrotor UAVsarXiv preprint arXiv:2401.11445, 2024 -
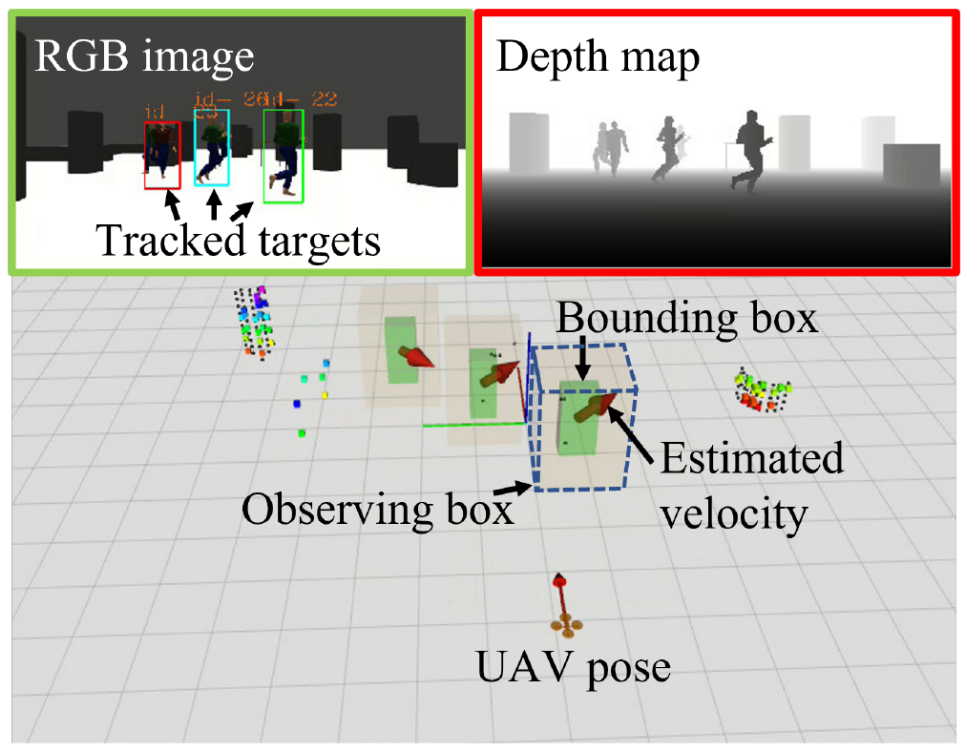 Flying in Dynamic Scenes With Multitarget Velocimetry and Perception-Enhanced PlanningIEEE/ASME Transactions on Mechatronics, 2023
Flying in Dynamic Scenes With Multitarget Velocimetry and Perception-Enhanced PlanningIEEE/ASME Transactions on Mechatronics, 2023 -
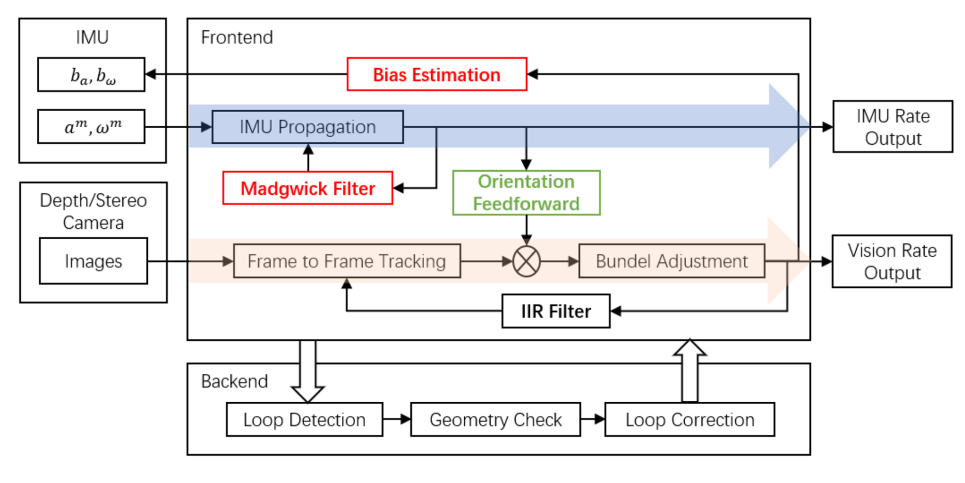 Stereo visual inertial pose estimation based on feedforward and feedbacksIEEE/ASME Transactions on Mechatronics, 2023
Stereo visual inertial pose estimation based on feedforward and feedbacksIEEE/ASME Transactions on Mechatronics, 2023



